库卡机器人坐标转换要遵循什么准则?
一.概要
已使用过库卡机器人的老铁们,应该知道要表示一个机器人的直角坐标系的位置会用到FRAME/POS/E3POS/E6POS类型的数据,其中
-X/Y/Z表示直角坐标系直线坐标;
-A/B/C: 表示直角坐标系旋转坐标;
-S/T : 表示机器人的状态与转角;
-E1..E6表示外部轴的角度;
库卡的欧拉角Euler-A-B-C对应的是Z->Y->X;
二.欧拉角说明
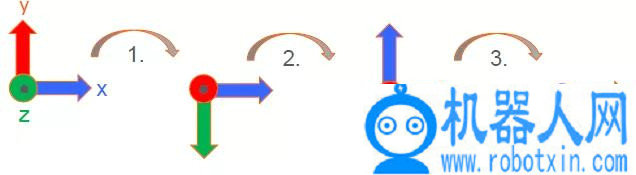
1.库卡机器人坐标转换的遵循的准则
- 第一步X/Y/Z变换(顺序无关);
- 第二步A/B/C变换(先A,再B,C);
2.案例
-绕X转90°,再绕Y转90°,绕Z转90°
-绕Y转90°,再绕X转90°,绕Z转90°

三.几何运算符
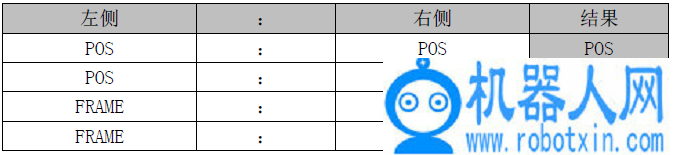
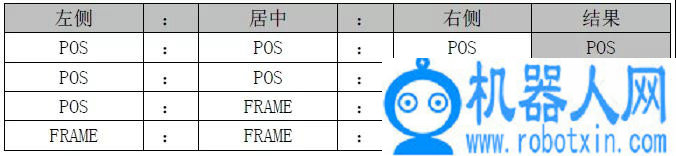
用几何运算符可以以几何方式相加位置。几何相加也被称之为“Frame 运算”。在 KRL 中通过冒号“” 表示几何运算符。
1.适用数据类型FRAME/POS/E6POS类型数据;
2.两个运算数的运算
3.三个运算数的运算
四.应用场景
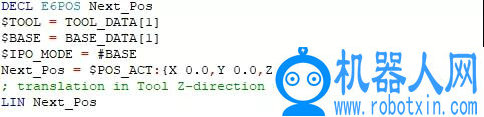
1.机器人基于当前位置沿工具Z向移动100mm
-传统LIN_REL {Z 100} #TOOL
-几何运算符
2.机器人基于当前位置沿基座标Z向移动100mm
-传统LIN_REL {Z 100} #BASE
-几何运算符

注意:不推荐使用相对运动指令;
3.视觉相机知会机器人应该沿着基座标X方向偏-0.5,沿着Y方向偏移1.1,沿着A方向旋转0.2,由于视觉每一次修正值不一定一样,常规做法:
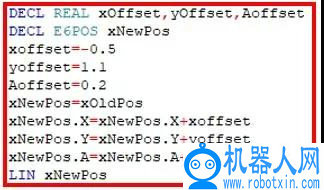
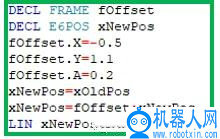
最好的做法是用几何运算符
五.扩展(偏移功能)
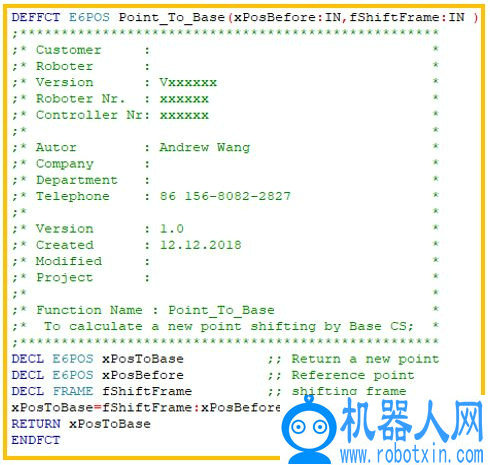
1.计算点相对基座标CS偏移
2.计算点相对工具CS偏移
机器人培训
- 达芬奇机器人献爱心 将主刀公益手术
- 亚马逊将在英国招聘2000多人 重点开发Alexa和无人
- 美、德、英、日、中5国机器人发展全景大盘点
- 国产机器人窗口期 不可错失制造2025弯道超车机会
- 一个小时,这只机械狗“自学”会了走路!
- 三穗长吉镇:无人机飞防作业 稳粮增豆保丰收
- 依靠静电着陆的新型机器人
- 工业机器人推广应用座谈会
- 在苹果的智能机器人软件公司是一种怎样的体验
- 四大家族之KUKA工业机器人应用案例分析
- 万事俱备只欠东风?机器人产业的东风到底在哪
- 欧洲 6 轮送货机器人开始在美国大学推广
- 芜湖:考核第一!6项冠军!
- 人工智能有望打破医疗资源不均衡
- 立讯精密:已进军新能源汽车市场,目标成为全
- 90后用机器人炒菜周入10万,炒菜机器人真的有可