ABB机器人生产口罩之输送链跟踪
富士康,比亚迪、通用五菱、和硕,中石化,广汽部件,各行各业都在改造产房,转行生产口罩!!!
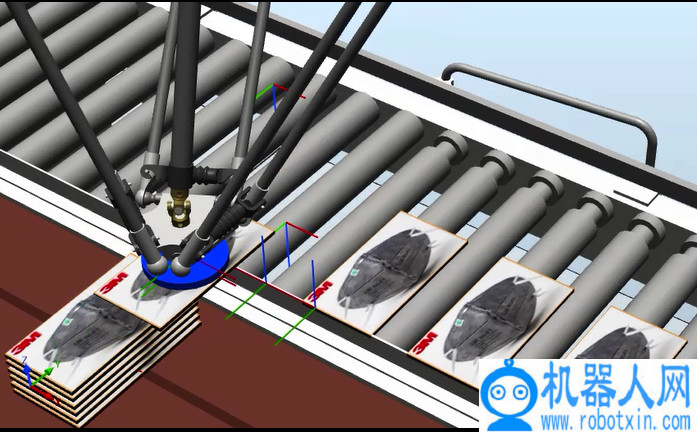
机器人对口罩装箱码垛,是最在行的啦~~
以下介绍如何创建输送链跟踪及跟随抓取放置
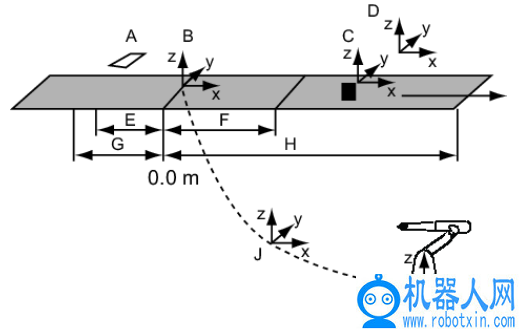
产品从左往右流动,经过A的同步开关,系统知晓产品进入队列;
B为输送链跟踪的零点;
产品经过B进入F区域(开始窗口),此时如果机器人空闲,机器人就会跟踪产品并完成跟踪动作,若机器人在跟踪前一个产品,则刚进入开始窗口的产品被放弃;
H为最大跟踪距离,若产品超过该距离,机器人还未完成跟踪,机器人停止并报警;
E为最小跟踪距离,理论上输送链倒走,机器人也可跟踪;
G为同步开关到开始窗口的距离;
1)导入ABB机器人,输送链模型及产品模型
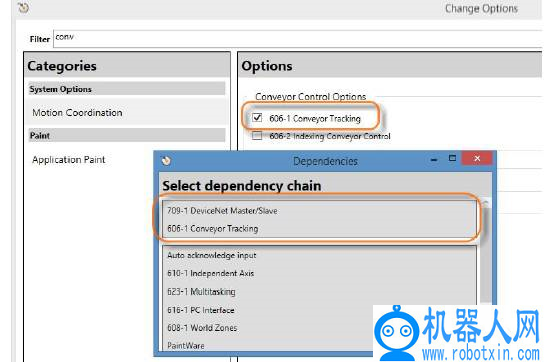
2)从布局建立系统,创建时添加选项606-1conveyor traking
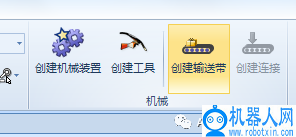
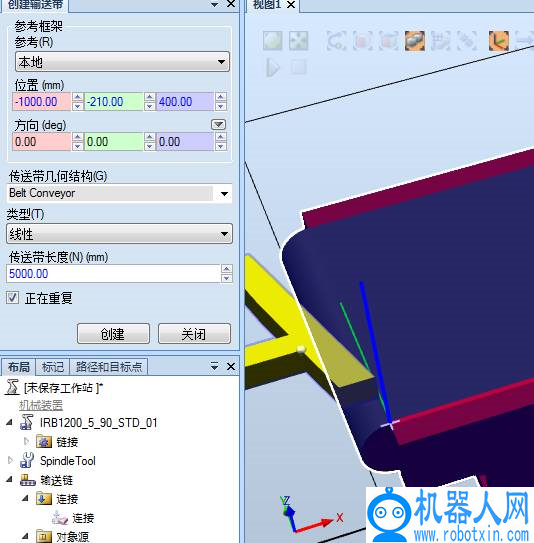
3)建模-创建输送链
4)设置起始点,传送带结构,传送带长度
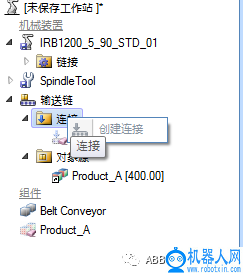
5)创建连接
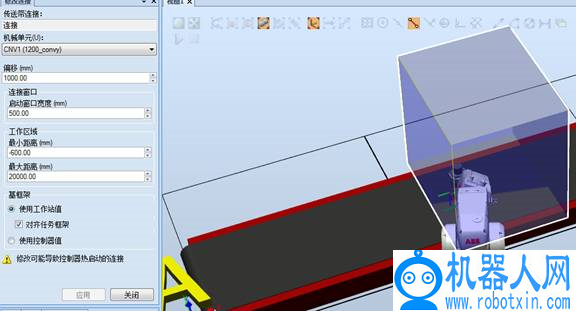
6)设置偏移(同步开关到开始窗口距离),启动窗口宽度(如图所示的启动窗口,即产品进入启动窗口区域且机器人空闲,机器人会去跟踪产品),完成后控制器会重启
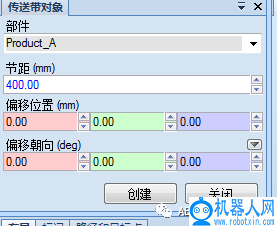
添加输送链对象

7)设置节距(产品间距)
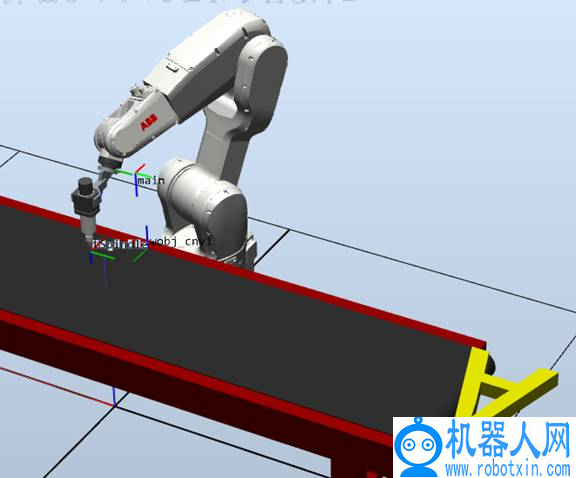
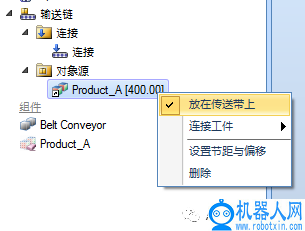
8)把产品放在输送链上
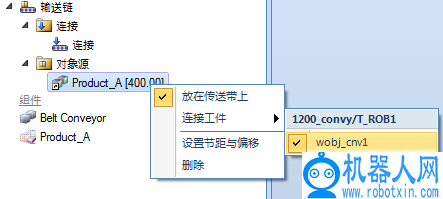
9) 产品和动坐标系连接
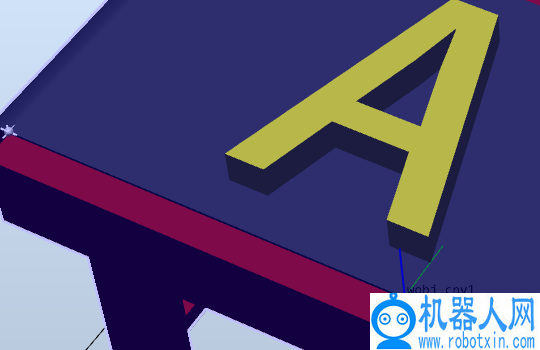
10)此时可以点击下图操纵测试,正确的话产品和坐标系都一起动

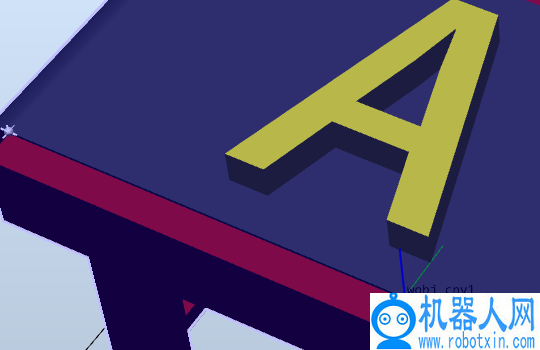
11)操纵产品到机器人可达位置,使用工具和动坐标系创建轨迹(自动轨迹)
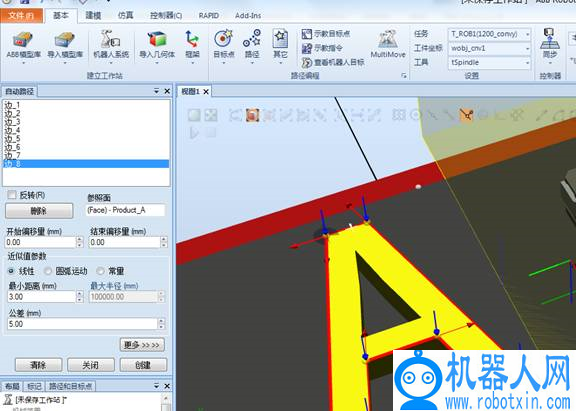
12) 调整点位姿态
13) 如下图调整程序
PROC main()
reset do_attach;
ActUnit CNV1;!激活输送链
Path_home;!机器人回到Home,在aitobj前一句运动语句必须为fine
reg1:=0;
WHILE reg1<10 DO
WaitWObj obj_v1;
!等待产品进入开始窗口
Path_10;
rPlace offs(pPlace,0,0,11reg1);
reg1:=reg1+1;
ENDWHILE
ENDPROC
PROC Path_home()
MoveL pHome,vmax,fine,mygripper\WObj:=obj0;
ENDPROC
PROC Path_10()
MoveL offs(pPick,0,0,20),v5000,z100,mygripper\WObj:=obj_v1;
MoveL pPick,v1000,fine,mygripper\WObj:=obj_v1;
set do_attach;
aittime 0.1;
MoveL offs(pPick,0,0,20),v5000,z100,mygripper\WObj:=obj_v1;
ENDPROC
PROC rPlace(robtarget pPlace1)
MoveL offs(pPlace1,0,0,20),v5000,z100,mygripper\WObj:=obj0;
MoveL pPlace1,v1000,fine,mygripper\WObj:=obj0;
!丢弃跟踪前的运动语句必须为fine
DropWObj obj_v1;
!丢弃跟踪
reset do_attach;
aittime 0.1;
MoveL offs(pPlace1,0,0,20),v5000,z100,mygripper\WObj:=obj0;
ENDPROC
ENDMODULE
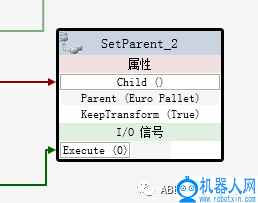
14)对于输送链跟踪时抓取的产品,由于产品本身属于输送链,即父集为输送链,在放下产品时,需要通过smart组件的SetParent,修改产品父集,否则放下的产品依旧会随输送链运动
机器人技术
- 800多家中国机器人企业近半无产品
- 看看机器人在和你抢什么
- 马化腾、李彦宏等科技企业大佬们在贵阳大数据
- 机器人投入汽车产业园 探索机器人产业链
- 特斯拉 Cybertruck 电动皮卡换上黑色外衣,有望为
- 沁峰如何成为冲压机器人细分赛道国家专精特新
- 运动机器人智障了吗?
- Rivian 将投资 50 亿美元在佐治亚州建造电动汽车工
- 调查发布 - 制造业在疫情防控常态化下突围——
- 未来工业机器人的市场什么样的变化
- 进博会特斯拉展台最全预测 沉浸式体验智能制造
- 美国将中国电动汽车关税提高到 100%,极星 CEO 对
- DeepMind 联合创始人:交互式 AI 才会“改变人类”
- 把握发展趋势 推动机器人产业高质量发展
- AI入侵教师职业,这五类产品发展迅猛
- 他们用AI和食用植物创造“人工肉食”,你想尝尝