ABB弧焊机器人与国产焊机总线通讯
机器人技术 2019-12-13 14:32www.robotxin.com机器人技术
1. 机器人与焊机之间,通常采用I/O+模拟量的通讯方式,通过DI/DO控制起弧收弧,通过AO信号控制焊机的电流和电压。
2. 越来越多的焊机支持总线通讯,例如ProFiNet,Ether/IP,DeviceNet等。
3. 本文举例ABB机器人与国产奥太焊机基于DeviceNet通讯配置
4. 确认机器人有DeviceNet选项。
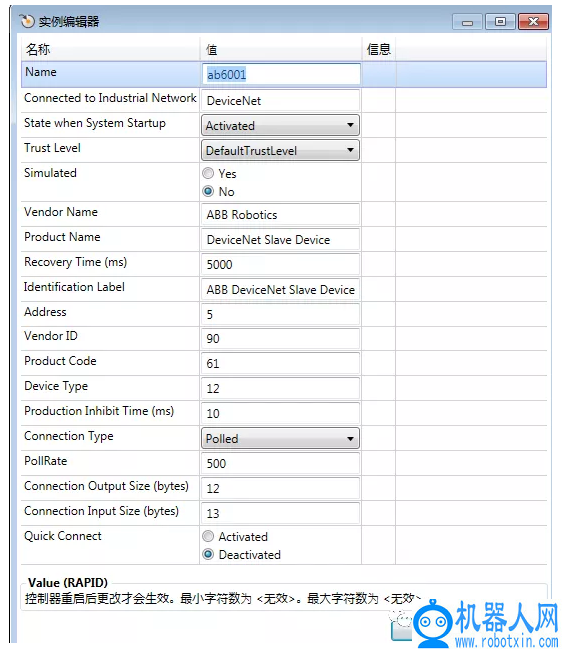
5. 进入控制面板-配置-主题I/O,点击DeviceNet Device,新建。模板选择Device generic
Device

6. 根据奥太焊机提供的参数,修改如下,其中默认奥太焊机DeviceNet地址为5.
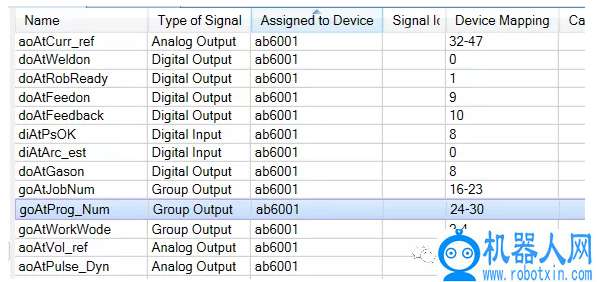
7. 进入signal,根据奥太焊机定义,创建信号,所属Device选择刚创建的ab6001
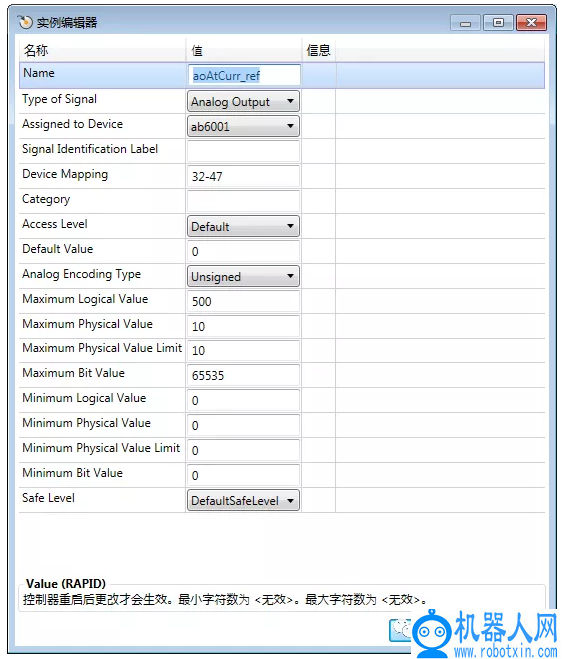
8. 假设连接的为奥太500型焊机(最大电流为500A),创建的控制电流模拟量aoAtCurr_ref参数设置如下
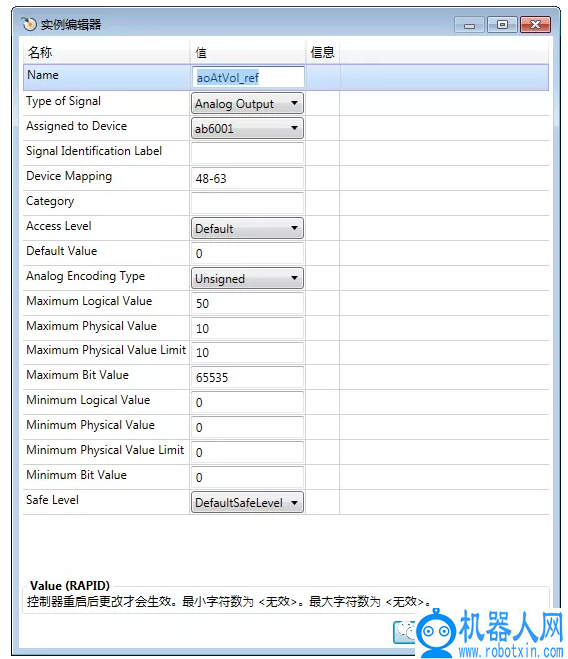
9. 设置的电压控制aoATVol_ref参数如下(具体数据参考奥太焊机手册)
10,进入配置-主题PROC,如下
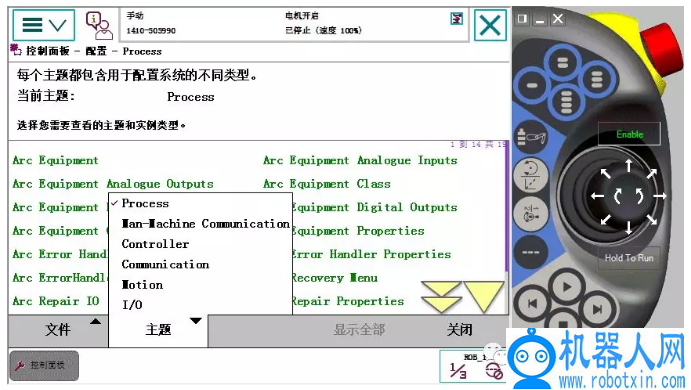
11. 进入Arc Equipment Analogue Outputs界面,选择对应的电流电压变量
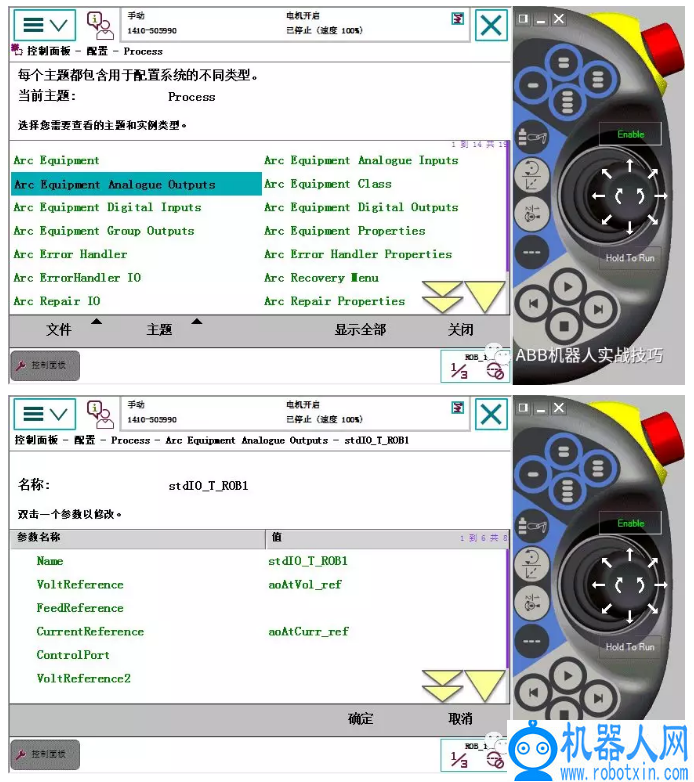
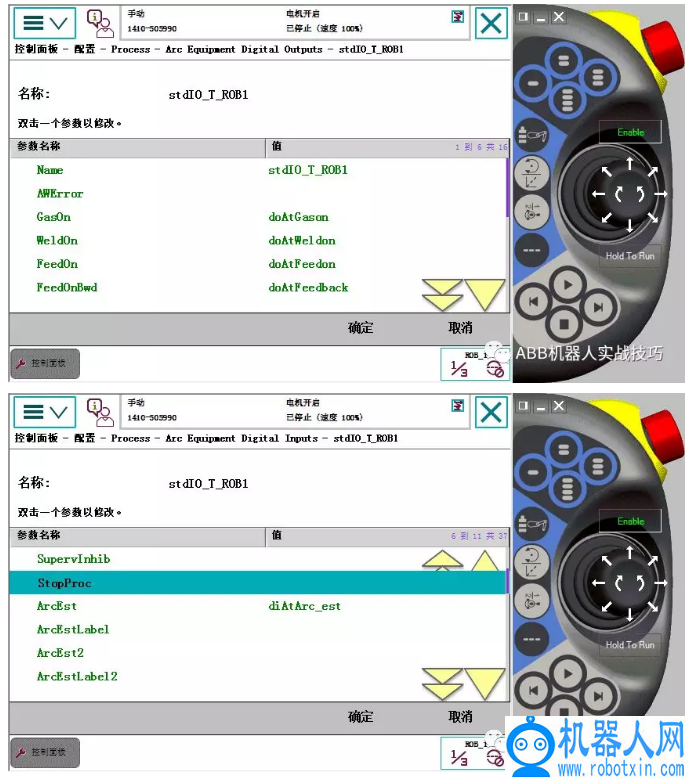
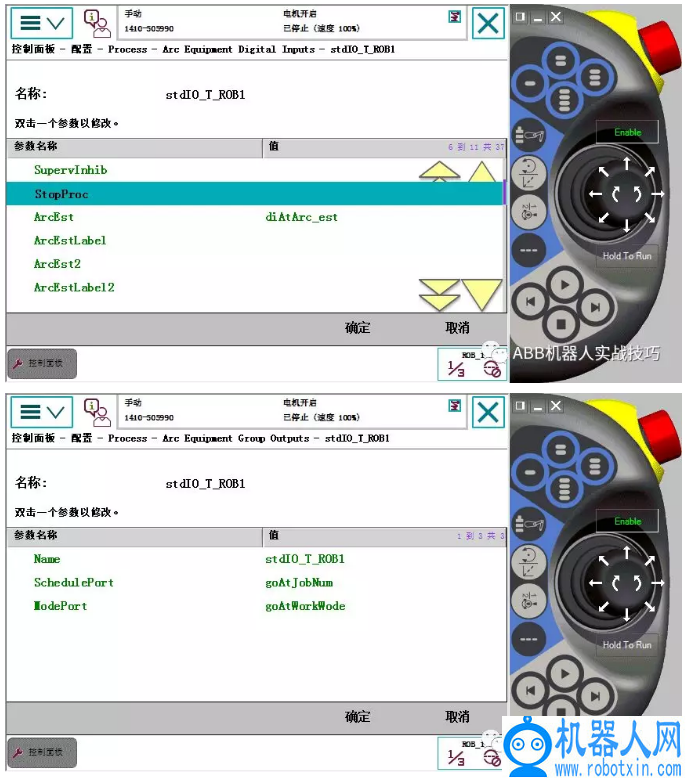
12. 同理设置Arc Equipment Digital Outputs和Arc Equipment Digital Inputs以及Arc Equipment Group Outputs
13 若要开启起弧,收弧参数,关闭回烧功能等,进入Arc Equipment Properties进行设置,参考如下。

14. 完成后重启即可。

机器人技术
- 工业机器人与数控机床融合应用简析
- 人工智能起风了 中小企业如何在运营中用好它
- 1500字大学生通用工业机器人职业规划书 有哪些要
- 制造型企业应如何开展生产现场数据分析
- 回顾 复亚智能无人机自动机场高低温测试及结露
- 中国机器人产业现状及发展趋势
- 中联重科 补齐短板与 拉长短腿的创新实践
- 清洁机器人路径规划
- 我国海上第一深井正式投产 钻井深度 9508 米、每
- 将推进机器人产业向高端发展 防止行业无序竞争
- 日本排名前三的人工智能机器人美女 真的很美
- 最早出现的机器人是什么 历史追溯与分析
- 哪来的机器人啊英文
- 怎么挑选服务机器人英语
- 数控深孔钻JHD1817 JHD2180JHD1660
- 电饭煲跟扫地机器人之后 小米又开始卖冰箱了