工业机器人常用电机驱动系统的分类与要求
机器人电动伺服驱动系统是利用各种电动机产生的力矩和力,直接或间接地驱动机器人本体以获得机器人的各种运动的执行机构。
对工业机器人关节驱动的电动机,要求有最大功率质量比和扭矩惯量比、高起动转矩、低惯量和较宽广且平滑的调速范围。特别是像机器人末端执行器(手爪)应采用体积、质量尽可能小的电动机,尤其是要求快速响应时,伺服电动机必须具有较高的可靠性和稳定性,并且具有较大的短时过载能力。这是伺服电动机在工业机器人中应用的先决条件。
一、机器人对关节驱动电机的主要要求
1、快速性
电动机从获得指令信号到完成指令所要求的工作状态的时间应短。响应指令信号的时间愈短,电伺服系统的灵敏性愈高,快速响应性能愈好,一般是以伺服电动机的机电时间常数的大小来说明伺服电动机快速响应的性能。
2、起动转矩惯量比大
在驱动负载的情况下,要求机器人的伺服电动机的起动转矩大,转动惯量小。
3、控制特性的连续性和直线性
随着控制信号的变化,电动机的转速能连续变化,有时还需转速与控制信号成正比或近似成正比。
4、调速范围宽
能使用于11000~10000的调速范围。
5、体积小、质量小、轴向尺寸短
6、能经受得起苛刻的运行条件
可进行十分频繁的正反向和加减速运行,并能在短时间内承受过载。
目前,由于高起动转矩、大转矩、低惯量的交、直流伺服电动机在工业机器人中得到广泛应用,一般负载1000N(相当100kgf)以下的工业机器人大多采用电伺服驱动系统。所采用的关节驱动电动机主要是AC伺服电动机,步进电动机和DC伺服电动机。
其中,交流伺服电动机、直流伺服电动机、直接驱动电动机(DD)均采用位置闭环控制,一般应用于高精度、高速度的机器人驱动系统中。步进电动机驱动系统多适用于对精度、速度要求不高的小型简易机器人开环系统中。交流伺服电动机由于采用电子换向,无换向火花,在易燃易爆环境中得到了广泛的使用。机器人关节驱动电动机的功率范围一般为0.1~10kW。
二、机器人驱动系统中所采用的电动机
工业机器人驱动系统所采用的电机大致可细分为以下几种
1、交流伺服电动机
包括同步型交流伺服电动机及反应式步进电动机等。
2、直流伺服电动机
包括小惯量永磁直流伺服电动机、印制绕组直流伺服电动机、大惯量永磁直流伺服电动机、空心杯电枢直流伺服电动机。

3、步进电动机
包括永磁感应步进电动机。
速度传感器多采用测速发电机和旋转变压器;位置传感器多用光电码盘和旋转变压器。近年来,国外机器人制造厂家已经在使用一种集光电码盘及旋转变压器功能为一体的混合式光电位置传感器,伺服电动机可与位置及速度检测器、制动器、减速机构组成伺服电动机驱动单元。
机器人驱动系统要求传动系统间隙小、刚度大、输出扭矩高以及减速比大。
三、常用的减速机构
1、RV减速机构;
2、谐波减速机械;
3、摆线针轮减速机构;
4、行星齿轮减速机械;
5、无侧隙减速机构;
6、蜗轮减速机构;
7、滚珠丝杠机构;
8、金属带/齿形减速机构;
9、球减速机构。
工业机器人电动机驱动原理如图所示
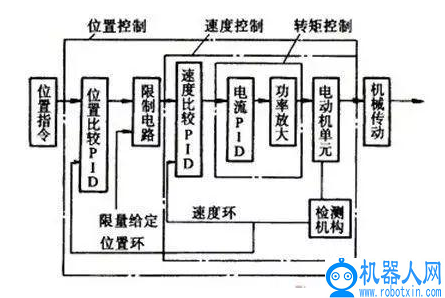
工业机器人电动伺服系统的一般结构为三个闭环控制,即电流环、速度环和位置环。目前国外许多电动机生产厂家均开发出与交流伺服电动机相适配的驱动产品,用户根据自己所需功能侧重不同而选择不同的伺服控制方式,一般情况下,交流伺服驱动器,可通过对其内部功能参数进行人工设定而实现以下功能
1、位置控制方式;
2、速度控制方式;
3、转矩控制方式;
4、位置、速度混合方式;
5、位置、转矩混合方式;
6、速度、转矩混合方式;
7、转矩限制;
8、位置偏差过大报警;
9、速度PID参数设置;
10、速度及加速度前馈参数设置;
11、零漂补偿参数设置;
12、加减速时间设置等。
四、驱动器种类
1、直流伺服电动机驱动器
直流伺服电动机驱动器多采用脉宽调制(PWM)伺服驱动器,通过改变脉冲宽度来改变加在电动机电枢两端的平均电压,从而改变电动机的转速。
PWM伺服驱动器具有调速范围宽、低速特性好、响应快、效率高、过载能力强等特点,在工业机器人中常作为直流伺服电动机驱动器。
2、同步式交流伺服电动机驱动器
同直流伺服电动机驱动系统相比,同步式交流伺服电动机驱动器具有转矩转动惯量比高、无电刷及换向火花等优点,在工业机器人中得到广泛应用。
同步式交流伺服电动机驱动器通常采用电流型脉宽调制(PWM)相逆变器和具有电流环为内环、速度环为外环的多闭环控制系统,以实现对三相永磁同步伺服电动机的电流控制。根据其工作原理、驱动电流波形和控制方式的不同,它又可分为两种伺服系统
(1)矩形波电流驱动的永磁交流伺服系统。
(2)正弦波电流驱动的永磁交流伺服系统。
采用矩形波电流驱动的永磁交流伺服电动机称为无刷直流伺服电动机,采用正弦波电流驱动的永磁交流伺服电动机称为无刷交流伺服电动机。
3、步进电动机驱动器
步进电动机是将电脉冲信号变换为相应的角位移或直线位移的元件,它的角位移和线位移量与脉冲数成正比。转速或线速度与脉冲频率成正比。在负载能力的范围内,这些关系不因电源电压、负载大小、环境条件的波动而变化,误差不长期积累,步进电动机驱动系统可以在较宽的范围内,通过改变脉冲频率来调速,实现快速起动、正反转制动。作为一种开环数字控制系统,在小型机器人中得到较广泛的应用。但由于其存在过载能力差、调速范围相对较小、低速运动有脉动、不平衡等缺点,一般只应用于小型或简易型机器人中。
4、直接驱动
所谓直接驱动(DD)系统,就是电动机与其所驱动的负载直接耦合在一起,中间不存在任何减速机构。同传统的电动机伺服驱动相比,DD驱动减少了减速机构,从而减少了系统传动过程中减速机构所产生的间隙和松动,极大地提高了机器人的精度,也减少了由于减速机构的摩擦及传送转矩脉动所造成的机器人控制精度降低。而DD驱动由于具有上述优点,所以机械刚性好,可以高速高精度动作,且具有部件少、结构简单、容易维修、可靠性高等特点,在高精度、高速工业机器人应用中越来越引起人们的重视。
作为DD驱动技术的关键环节是DD电动机及其驱动器。它应具有以下特性
(1)输出转矩大为传统驱动方式中伺服电动机输出转矩的50~100倍。
(2)转矩脉动小DD电动机的转矩脉动可抑制在输出转矩的5%~10%以内。
(3)效率与采用合理阻抗匹配的电动机(传统驱动方式下)相比,DD电动机是在功率转换较差的使用条件下工作的。,负载越大,越倾向于选用较大的电动机。
目前,DD电动机主要分为变磁阻型和变磁阻混合型,有以下两种结构型式
(1)双定子结构变磁阻型DD电动机;
(2)中央定子型结构的变磁阻混合型DD电动机。
5、特种驱动器
(1)压电驱动器
众所周知,利用压电元件的电或电致伸缩现象已制造出应变式加速度传感器和超声波传感器,压电驱动器利用电场能把几微米到几百微米的位移控制在高于微米级大的力,所以压电驱动器一般用于特殊用途的微型机器人系统中。
(2)超声波电动机
(3)真空电动机
用于超洁净环境下工作的真空机器人,例如用于搬运半导体硅片的超真空机器人等。
机器人技术
- 工业机器人与数控机床融合应用简析
- 人工智能起风了 中小企业如何在运营中用好它
- 1500字大学生通用工业机器人职业规划书 有哪些要
- 制造型企业应如何开展生产现场数据分析
- 回顾 复亚智能无人机自动机场高低温测试及结露
- 中国机器人产业现状及发展趋势
- 中联重科 补齐短板与 拉长短腿的创新实践
- 清洁机器人路径规划
- 我国海上第一深井正式投产 钻井深度 9508 米、每
- 将推进机器人产业向高端发展 防止行业无序竞争
- 日本排名前三的人工智能机器人美女 真的很美
- 最早出现的机器人是什么 历史追溯与分析
- 哪来的机器人啊英文
- 怎么挑选服务机器人英语
- 数控深孔钻JHD1817 JHD2180JHD1660
- 电饭煲跟扫地机器人之后 小米又开始卖冰箱了